
Как можно рассчитать вклад в момент инерции который дают вал стержни передвижные грузы
Обновлено: 24.04.2024
Цель работы - исследовать зависимость момента инерции крестовины с надетыми на нее грузиками от распределения массы относительно оси вращения, проходящей через центр масс крестовины.
Теоретические основы лабораторной работы
При выводе расчётных формул лабораторной работы использованы законы динамики поступательного и вращательного движения твердого тела.
Второй закон Ньютона для поступательного движения тела (m = const)
где - сумма всех внешних сил, приложенных к телу; m – масса тела; - линейное ускорение.
Основной закон динамики вращательного движения твердого тела
где - суммарный момент внешних сил, приложенных к телу относительно оси вращения; J - момент инерции тела относительно той же оси; - угловое ускорение.
Момент инерции тела является мерой инертности тела при вращательном движении. Момент инерции тела зависит от размеров и формы тел и от распределения массы тела относительно оси вращения.
Момент инерции сплошного твёрдого тела определяется по формуле
где - расстояние от элемента объема с массой dm до оси вращения; r - плотность вещества.
Момент силы относительно точки О это вектор, определяемый как векторное произведение радиус-вектора и силы
где - сила, - радиус-вектор, проведенный из точки О, в точку приложения силы.
Момент силы относительно оси вращения это проекция вектора момента силы относительно точки на произвольную ось z, которая проходит через точку О:
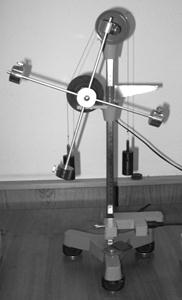
Основным элементом маятника Обербека (рис. 6.1) является крестовина (1), на стержнях которой размещены грузы (2). Грузы можно перемещать по стержням и закреплять в нужном положении. Крестовина с грузами насажена на вал, с двумя шкивами различных радиусов (rш). На один из шкивов наматывается нить (4), переброшенная через блок (5). К концу нити подвешен груз массой m (3). Под действием силы тяжести груза система приводится в движение.
На вертикальном штативе установлены две неподвижные рамки с оптическими осями (световые барьеры), между которыми может двигаться груз. Груз удерживается в верхнем положении электромагнитом. Время падения груза от верхнего до нижнего светового барьера фиксируется на секундомере.
На груз действует сила тяжести = m и сила натяжения . В соответствии со вторым законом Ньютона можно записать
В проекциях на вертикаль (с учётом знаков проекций)
где g - ускорение свободного падения; а – величина линейного ускорения, с которым движется груз.
Крестовина приходит во вращательное движение под действием момента силы натяжения
где rо - радиус шкива.
Из уравнений (2) - (4) можно получить
Используя соотношение между угловым и линейным ускорением а e = а/r0, получим выражение для момента инерции
Из кинематики известно, что линейное ускорение при равноускоренном движении определяется по формуле
а = 2h/t 2 (6.6)
где h - путь, пройденный грузом за время t принулевой начальной скорости.
Таким образом, подставляя (6.6) в (6.5), получим расчётную формулу для момента инерции крестовины с грузами
Из теоретических соображений следует, что момент инерции крестовины с четырьмя грузами массой (если считать грузы материальными точками), можно выразить формулой
где J0 - момент инерции тела при r = 0.
Из формулы (6.8) следует, что Jр = f(r 2 ). Следовательно, если построить график этой функции в координатах Jр - r 2 , то должна получиться прямая, продолжение которой будет пересекать ось ординат в некоторой точке, соответствующей Jо. Такое построение можно было бы сделать приближенно, «на глаз». Однако математические методы обработки результатов наблюдения позволяют сделать такое построение достаточно точным. Наиболее просто это можно сделать, с помощью метода наименьших квадратов, вычислив J0 и .
Для этого перепишем формулу (7.8) в виде
где r 2 = х и 4m' = b.
Метод наименьших квадратов позволяет найти коэффициенты уравнения (6.9) J0 и b, используя формулы
здесь число опытов; Ji - экспериментальные значения момента инерции Jэ, полученные для каждого опыта.
Порядок выполнения работы
1. Установить на вертикальном штативе со шкалой две неподвижные рамки (световые барьеры) на расстоянии 40-50 см друг от друга.
2. Измерить радиус шкива rш, на котором ведется эксперимент и путь, пройденный грузом.

3. Установить грузы на стержнях на максимальное расстояние от оси вращения и закрепить.
4. Включить установку нажатием кнопки «сеть».
5. Отключить электромагнит нажатием кнопки «пуск» и «сброс».
6. Выбрать необходимый груз по указанию преподавателя (табл.6.1).
| Основной груз | m = 53 г. или m = 100 г. | ||
| Перегрузы: | m1 = 1,554 г. | m6 = 2,504 г. | m10 = 19,528 г. |
| m2 = 1,705 г. | m7 = 2,714 г. | m11 = 26,258 г. | |
| m3 = 1,829 г. | m8 = 2,948 г. | m12 = 32,836 г. | |
| m4 = 2,055 г. | m9 = 12,800 г. | m13 = 39,251 г. | |
| m5 = 2,206 г. |
7. Намотать нить на шкив, установив подвешенный груз на уровне верхней рамки (над оптической осью верхнего светового барьера).
8. Закрепить груз, нажав кнопку «пуск» и обнулить счетчик (кнопка «сброс»).
9. Отпустить груз (кнопка «пуск») записать измеренное время движения груза t до оптической оси нижней рамки.
10. Произвести не менее 3-х измерений времени t и вычислить .
11. Сместить грузы на стержнях на 1 – 2 деления к центру и повторить п.п. (3÷6), измеряя расстояние r от оси вращения до центра масс груза.
Цель работы. Усвоить основной закон динамики вращательного движения. Косвенно измерить момент инерции цилиндрических тел. Установить зависимость осевых моментов инерции вращающихся на маховике грузов от расстояния до оси вращения.
Приборы и принадлежности.Маховик Обербека, автоматический счётчик времени, четыре цилиндрических тела с одинаковой массой, масштабная линейка.
Вращательным движением тела назывется такое движение, при котором все точки тела движутся по окружностям, плоскости которых параллельны друг другу, а центры лежат на одной прямой, называемой осью вращения.
Для измерения осевого момента инерции, в работе используется крестообразный маховик Обербека.
Маховик Обербека (рис. 3) представляет собой свободно вращающуюся относительно неподвижной горизонтальной оси крестовину, выполненную в виде четырёх взаимно перпендикулярных металлических стержней. Ось крестовины закреплена на вертикальной стойке, установленной на массивном основании. На стержни одеты цилиндрические муфты (2) известной массы, которые закрепляются на заданном расстоянии r от оси вращения с помощью стопорных винтов.
Перемещая муфты вдоль стержней на то или иное расстояние r, можно изменять осевой момент инерции системы. Считая, что масса однородного цилиндра сосредоточена в его геометрическом центре, где размещён стопорный винт, выразим осевой момент инерции муфт по формуле
На оси маховика жёстко укреплены два соосных шкива различных диаметров d1 и d2, на которые в один ряд наматывается нить (нить считаем нерастяжимой и невесомой). Один конец нити прикрепляется к шкиву, к другому концу нити, переброшенной через вспомогательный блок 1, подвешивается груз массой m (4).
Изменением массы груза m, путём наложения перегрузков с массой m1, можно изменять силу натяжения нити Т, под действием которой маховик совершает равномерно-ускоренное вращательное движение с угловым ускорением , которое согласно основному закону динамики вращательного движения (6) прямо пропорционально моменту силы натяжения нити . Поскольку сила натяжения направлена вертикально, её плечо в соответствии с (3) равно или .
Одновременно под действием силы тяжести груз m совершает равноускоренное поступательное движение вниз. При этом считаем, что момент сил трения относительно оси вращения маховика мал по сравнению с моментом силы натяжения нити.
На вертикальной стойке прибора укреплены два кронштейна: нижний (5) – неподвижный, верхний (3) – подвижный. Верхний кронштейн можно перемещать вдоль стойки и фиксировать в любом положении, задавая тем самым длину пути h вертикального перемещения груза m.
Для измерения длины пути на стойке нанесена миллиметровая шкала.
Прибор снабжён счётчиком времени – миллисекундомером, не ведущим отсчёт времени при нажатых кнопках «сеть» или «сброс».
Измерения времени движения груза m осуществляется с использованием двух фотоэлектрических датчиков, вмонтированных в верхний и нижний кронштейны и подключенных к секундомеру. Расстояние между световыми лучами обоих датчиков равно длине пути вертикального перемещения груза h. Датчики включаются в работу при нажатии клавиши «сеть».
Нажатие клавиши «пуск» включает секундомер и одновременно выключает электромагнит, удерживающий крестовину, после чего начинается вращение крестовины и движение груза m вниз.
При пересечении грузом верхнего светового луча секундомер начинает отсчёт времени. При пересечении нижнего светового луча секундомер автоматически выключается. Время движения груза от одного светового луча до другого высвечивается на индикаторе секундомера с абсолютной ошибкой , что намного меньше точности измерения времени человеком-оператором.
Расстояние между центрами масс, противоположно закреплённых грузов, измеряются мерной линейкой. Диаметры шкивов измеряются штангенциркулем. Массы грузов 4 заданы с абсолютной погрешностью .
Перед выполнением опытов на маховике Обербека необходимо добиться симметричного распределения грузов на крестовине. Это делается путём перемещения грузов 2 на противоположных стержнях так, чтобы при ненатянутой нити грузы оставались в состоянии безразличного равновесия.
Для проведения опытов маховик приводят в равноускоренное вращательное движение, опуская груз m1 с заданной высоты и измеряя при этом время его движения t на пути h. Линейное ускорение движения груза можно вычислить по формуле
Так как при движении груза нить сматывается со шкива без проскальзывания, то линейное ускорение груза равно касательному ускорению точек, лежащих на цилиндрической поверхности шкива. Следовательно, угловое ускорение маховика
(где - радиус шкива).
С другой стороны согласно основному закону динамики вращательного движения (6) угловое ускорение пропорционально моменту силы натяжения нити и обратно пропорционально моменту инерции I всей системы (блок, крестовина, грузы) - . Момент силы
(где Т – сила натяжения нити, d/2 - плечо силы).
Согласно второму закону Ньютона действующая на нить сила
(где g – ускорение свободного падения, - линейное ускорение поступательного движения груза).
Поскольку нить не растяжима сила F, уравновешивается силой T. Следовательно, момент силы
Выразив из уравнения (6) и подставив в эту формулу и из (18) и (20) получим:
(22).
Как видно из (22), чтобы косвенно измерить момент инерции, надо прямыми измерениями найти массу груза,
создающего натяжение нити, диаметр блока, по которому движется точка приложения силы, высота с которой опускается груз, и время опускания.
Вычисленное по формуле (22) значение момента инерции маховика включает в себя момент инерции крестовины с блоком и момент инерции четырёх грузов с массой m (2):
(23).
Искомый момент инерции грузов
(24),
где - осевой момент инерции вращающихся грузов 2;
- осевой момент инерции маховика без грузов;
- осевой момент инерции маховика с грузами.
Осевой момент инерции маховика без грузов измеряется так же, как и момент инерции . В формулу подставляются значения и , измеренные при вращении крестовины со снятыми с неё грузами.
Считая грузы материальными точками, можно рассчитать теоретическое значение осевого момента инерции по формуле (16):
(где m – масса одного вращающегося груза 2, r – расстояние центра масс груза от оси вращения).
Сопоставление значений моментов инерции четырёх вращающихся грузов, рассчитанных по формулам (23) и (24) позволяет судить о качестве проделанной работы.
Проделав косвенные измерения момента инерции груза при разных значениях расстояния их центров от оси вращения (поочерёдно размещая грузы 2 на концах стержней, на их середине и вблизи оси крестовины), можно опытным путём установить характер зависимости момента инерции от распределения массы относительно оси вращения. По определению момента инерции, как меры инертности тела при вращательном движении, эта зависимость является квадратичной (5). Графиком такой зависимости является парабола . Откладывая на оси значения моментов инерции, рассчитанных по формулам (23) и (24), а по оси квадрат расстояния , можно построить экспериментальные и теоретические параболы. При этом принимать коэффициент равным массе 4-х грузов ( ). Совмещение точек таких парабол служит подтверждением качества выполнения эксперимента и правомерности применения модели материальных точек к однородным цилиндрам равной длины.
Выведем рабочую формулу для определения момента инерции тела.
Если предоставить возможность грузу падать, то это падение будет происходить с ускорением , а уравнением поступательного движения груза на нити будет (по второму закону Ньютона (8.19) в проекции на вертикальную ось): , (8.21) где – сила натяжения нити. Отсюда . (8.22)
Сила натяжения нити сообщает угловое ускорение вращающемуся маятнику. Момент этой силы относительно оси вращения находим из (8.9); так как нить является касательной к шкиву, плечо силы l совпадает с радиусом шкива r, и тогда: . (8.23)
Тогда уравнение вращательного движения маятника (8.18) запишется в виде , или: . (8.24)
Так как нить нерастяжима и проскальзывания нет, линейное ускорение a груза связано с угловым ускорением шкива соотношением (см. (8.5)):
Так как поступательное движение груза m поступательное без начальной скорости, то расстояние (высота ), проходимое грузом за время , равно , откуда находим ускорение: . (8.26)
Решая совместно (8.24), (8.25) и (8.26), находим момент инерции маятника:
, (8.27) а также выражение для углового ускорения:
(8.28) и момента силы: . (8.29)
а) Определение углового ускорения маятника Обербека и момента силы натяжения;
б) проверка основного закона динамики вращательного движения:
1. Измерить штангенциркулем диаметр шкива 3 и найти его радиус .
2. Закрепить грузы на концах крестовины в крайних положениях. Добиться равновесия крестовины при любом ее повороте.
3. Положить на тарелочку гирьку массой (около 100 г).
4. Вращая крестовину рукой, намотать нить на шкив.
5. Зафиксировать тарелочку с грузом на высоте h=0.7÷0.8 от наинизшего положения. Записать величину h в таблицу по форме 8.1.
6. Освободить груз и записать в таблицу по форме 8.1 время его опускания.
7. Повторить измерение времени для одной и той же высоты пять раз, рассчитать среднее время и его среднюю погрешность и все результаты записать в таблицу по форме 8.1.
8. Повторить измерения (пункты 4÷6) с массой (150÷200 г), заменив гирьки на тарелочке.
9. Рассчитать угловые ускорения и по формуле (8.28), найти их отношение . (8.31)
10. Рассчитать моменты сил и по формуле (8.29), найти их отношение . (8.32)
11. Оценить погрешности определения , и их отношений и .
12. Все результаты занести в таблицы по форме 8.2.
13. Сравнивая и , проверить соотношение , и сделать вывод.
| № | m1 = 1,15 кг | m2 =0,4 кг | h, м | Δh | r, м | Δr | |||
| t1, с | Δt1i | Δt1 | t2, с | Δt2i | Δt2 | ||||
| 4,26 | 0,3 | 0,2175 | 6,41 | 0,238 | 0,463 | 0,74 | 0,005 | 0,17 | 0,005 |
| 3,97 | 0,01 | 6,62 | 0,028 | ||||||
| 3,77 | 0,19 | 6,75 | 0,102 | ||||||
| 3,97 | 0,01 | 6,78 | 0,132 | ||||||
| 3,83 | 0,13 | 6,68 | 0,032 | ||||||
| - | t1ср.=3,96 | Σ(Δt1i) 2 = 0,1432 | t2ср.= 6,648 | Σ(Δt2i) 2 = 0,06488 |
| ε1, с -2 | М1, Н . м | ε2, с -2 | М2, Н . м | ||
| 0,5552 | 1,8975 | 0,197 | 0,6641 | 0,355 | 0,35 |
| Δε1 | ΔМ1 | Δε2 | ΔМ2 | ||
| 3,359 | 11,926 | 1,19 | 4,25 | 0,63 | 3,14 |
Замечание 1: погрешность времени рассчитывается по стандартной методике расчета погрешностей случайной величины:
, (8.38) где коэффициент Стьюдента для числа опытов n=5 и доверительной вероятности α=0.95 равен: tn α=2.57; Δti=|tср.- ti|.
Замечание 2: погрешности ε и М рассчитываются, исходя из формул (33) и (34) соответственно, по стандартной методике расчета погрешностей при косвенных измерениях:
, где производные равны:
Замечание 3: абсолютные погрешности отношений (31) и (32) удобнее считать, предварительно рассчитав относительные погрешности:
а) Определение момента инерции маятника Обербека;
б) проверка теоремы Штейнера.
1. Оставив грузы на концах стержней, измерить расстояние R1 от центра тяжести грузов на стержнях до оси вращения.
2. Оставив на тарелочке массу m, повторить 5 раз измерения времени движения груза с другой высотой h (пункты 4÷5 задания 1), рассчитать среднее время, по формуле (8.27) рассчитать момент инерции I1 крестовины с грузами, результаты занести в таблицы по форме 8.3 и 8.4.
3. Передвинуть грузы на середину стержней, измерить расстояние от центра тяжести грузов на стержнях до оси вращения.
4. Повторить измерение времени движения груза m 5 раз, рассчитать среднее время и момент инерции крестовины для нового положения грузиков на стержнях.
5. Повторить измерения и вычисления по пункту 4, передвинув грузики на стержнях вплотную к шкиву, все результаты занести в таблицы по форме 8.3 и 8.4.
| № | h, м | m, кг | Грузы на концах стержней | Грузы посередине стержней | Грузы у шкива | |||||
| t1, с | Δt1i | Δt1 | t2, с | Δt2i | Δt2 | t3, с | Δt3i | Δt3 | ||
| 0,74 | 0,4 | 6,41 | 0,238 | 0,463 | 4,44 | 0,06 | 0,103 | 3,28 | 0,14 | 0,165 |
| 0,74 | 0,4 | 6,62 | 0,028 | 4,35 | 0,03 | 3,23 | 0,09 | |||
| 0,74 | 0,4 | 6,75 | 0,102 | 4,31 | 0,07 | 3,22 | 0,08 | |||
| 0,74 | 0,4 | 6,78 | 0,132 | 4,3 | 0,08 | 2,97 | 0,17 | |||
| 0,74 | 0,4 | 6,68 | 0,032 | 4,5 | 0,12 | 0,14 | ||||
| Δh= 0,005 | Δm= 0,005 | t1ср.= 6,648 | Σ(Δt1i) 2 = 0,06488 | t2ср.= 4,38 | Σ(Δt2i) 2 = 0,0302 | t3ср.= 3,14 | Σ(Δt3i) 2 = 0,0826 |
| I1, кг . м 2 | I2, кг . м 2 | I3, кг . м 2 | R1, м | R2, м | R3, м | ||
| 5,65 | 0,61 | 0,023 | 0,22 | 0,11 | 0,03 | 0,002033 | 0,00266 |
| ΔI1 | ΔI2 | ΔI3 | ΔR1 | ΔR2 | ΔR3 | ||
| 53,8 | 11,23 | 2,15 | 0,0005 | 0,0005 | 0,0005 | 5,04 | 5,627 |
6. Оценить погрешность момента инерции .
7. Рассчитать изменение момента инерции маятника Обербека при передвижении грузов с конца стержней на середину по формулам:
где m0 = 0.14 кг.
8. Сравнить изменение момента инерции маятника Обербека, рассчитанного с использованием теоремы Штейнера по формулам (8.35) и (8.36) и полученного экспериментально по данным табл. 8.3:
9. Сделать выводы.
Замечание 1: погрешность времени рассчитывается по стандартной методике расчета погрешностей случайной величины по формуле (8.33).
Замечание 2: погрешность I рассчитывается, исходя из формулы (8.27) по стандартной методике расчета погрешностей при косвенных измерениях:
Определение и общие понятия момента инерции стержня
Это скалярная (в общем случае тензорная) физическая величина, которую определяют как сумму произведений масс материальных точек ( ) на которые разбивают тело на квадраты расстояний ( ) от них до оси вращения:
Если тело рассматривают как непрерывное, то суммирование в формуле (1) заменяют на интегрирование, массы элементов тела обозначают как , тогда J тела, вращающегося около оси:
![\[J=\int_m{r^2dm=\int_V{r^2}\rho dV} \qquad (2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-1cf2036210d43b5249fa9d2002988d6c_l3.jpg)
где r – функция положения материальной точки в пространстве; – плотность тела; –объем элемента тела. Для однородного тела выражение (2) представим как:
Формула для вычисления момента инерции однородного стержня
Определим формулу для вычисления момента инерции однородного стержня, вращающегося относительно оси ( ), которая проходит перпендикулярно стержню и идет через его один конец. Масса стержня равна m, длина l (рис.1).

Выделим в объеме стержня материальную точку ( ), которая находится от оси вращения на расстоянии r. Ее момент инерции равен:
Будем считать, что толщина стержня много меньше, чем его длина, тогда массу можно считать распределенной по длине стержня
Обозначим линейную плотность стержня как , тогда:
где – объем, стержня, который занимает наша материальная точка. Для нахождения момента инерции всего стержня проинтегрируем выражение (4), учитывая (6) и то, что :
![\[J=\int^l_0{\tau r^2dr=\tau}{\left.\frac{r^3}{3}\right|}^l_0=\tau \frac{l^3}{3} \qquad (7)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-7b6bdb47dad0cb142013a48c51829fa4_l3.jpg)
формулу (7) перепишем в виде:
Мы получили, что момент инерции стержня вращающегося относительно оси, перпендикулярной ему и проходящей через один их его концов равен:
Для того чтобы получить момент инерции относительно оси, перпендикулярной стержню и проходящей через центр масс стержня ( ), следует рассмотреть интеграл:
в котором расстояние изменяется в пределах: :
![\[J=\int^{\frac{l}{2}}_{-\frac{l}{2}}{\tau r^2dr=}{\left.\frac{r^3}{3}\right|}^{\frac{l}{2}}_{-\frac{l}{2}}=\tau \frac{l^3}{12}=\frac{ml^2}{12} \qquad (11)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-46e353be7b12740a621445dc178160ed_l3.jpg)
Формула (11) дает момент инерции относительно оси, перпендикулярной стержню и проходящей через его центр масс.
Примеры решения задач
| Задание | Определите момент инерции тонкого однородного стержня длиной м и массой кг относительно оси, которая ему перпендикулярна и проходит через точку стержня находящуюся на расстоянии м от одного из его концов (рис.2). |
| Решение | Сделаем рисунок. |

Момент инерции стержня, относительно оси, которая изображена пунктиром (проходящая через центр масс стержня), нам известен, он равен:
Ось, относительно которой нам следует найти момент инерции, параллельна исходной и находится от нее на расстоянии . Для решения задачи мы можем использовать теорему Штейнера (так как условие параллельности выполнено):
![\[J=J_0+m{(\frac{l}{2}-a)}^2=m\frac{l^2}{12}+m{(\frac{l}{2}-a)}^2 \qquad (1.2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-9cca2054ed3442646d5bc6e06a1a847e_l3.jpg)
Проведем вычисления искомого момента инерции:
![\[J=0,1\left(\frac{{\left(0,6\right)}^2}{12}+{\left(\frac{0,6}{2}-0,2\right)}^2\right)=0,004\ \left(kg\cdot m^2\right)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-cd9309051efea3146922e1b48e90f476_l3.jpg)
| Задание | Два тонких однородных стержня соединены способом, который изображен на рис.3. Длина первого стержня Параметры второго стержня: и . Угол между стержнями равен 90 o . Ось параллельна второму стержню. Каким будет момент инерции системы? |
| Решение | Сделаем рисунок. |

Момент инерции первого стержня относительно оси мы найдем, используя формулу:
Для того чтобы определить момент инерции второго стержня выделим на нем элементарную массу . От любой элементарной массы данного стержня до оси вращения расстояние равно . Учтем это, когда запишем момент инерции для стержня номер два как:
![\[J_2=\int_{m_2}{l^2_1dm=m_2l^2_1} \qquad (2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-45670a4308d99beab46d7c8711ab43b9_l3.jpg)
Результирующий момент инерции данной системы стержней равен сумме моментов отдельных стержней:
Момент инерции относительно оси, вокруг которой происходит вращение – это мера инертности тела, совершающего вращательные движения.
Момент инерции является скалярной (в общем случае тензорной) физической величиной, которую находят как сумму произведений масс материальных точек ( ) (на которые следует провести разбиение рассматриваемого тела) на квадраты расстояний ( ) от них до оси вращения:
Если тело считают непрерывным, то суммирование в выражении (1) заменяется интегрированием, массы элементов тела обозначают как :
где r – функция положения материальной точки в пространстве; – плотность тела; –объем элемента тела. Если тело является однородным:
Момент инерции материальной точки
Роль массы при движении по окружности материальной точки выполняет момент инерции (J), который равен:
где r- расстояние от материальной точки до оси вращения. Для материальной точки, которая движется по окружности, момент инерции является постоянной величиной.
Момент инерции является аддитивной величиной. Это означает то, что если в системе не одна, а несколько материальных точек, то момент инерции системы (J) равен сумме моментов инерции ( ) отдельных точек:
Примеры моментов инерции некоторых тел
Момент инерции тонкого стержня вращающегося около оси, проходящей через его один конец и перпендикулярно стержню, равен:
Момент инерции прямого круглого конуса, массы высоты h и радиуса r вращающегося около своей оси:
Момент инерции однородного твердого параллелепипеда, c геометрическими параметрами и массой m вращающегося относительно своей самой длинной диагонали, вычисляют по формуле:
![\[J=\frac{m{(w}^2d^2+{l^2d}^2+{l^2w}^2)}{6(l^2+w^2+d^2)} \qquad(8)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-009f114ef77953b1a1b1474a3978e276_l3.jpg)
Момент инерции тонкой прямоугольной пластины массы m, ширины w и длины d, вращающейся относительно оси, которая проходит через точку пересечения диагоналей этого прямоугольника перпендикулярно плоскости пластины:
где m – масса шара; R – радиус шара. Шар вращается около оси, которая проходит через его центр.
Примеры формул для вычисления моментов инерции других тел можно посмотреть в разделе «Момент инерции». В этом же разделе можно ознакомиться с теоремой Штейнера.
Примеры решения задач по теме «Момент инерции»

где расстояние от точки до оси вращения равно . Следовательно, формула (1.1) преобразуется к виду:
Так как массы первой и второй материальных точек равны, равны расстояния от каждой из них до оси вращения, то:
Момент инерции является аддитивной величиной, значит, момент инерции двух точек найдем как сумму и :
![\[{J=J}_1+J_2=2\cdot m{\left(\frac{l}{2}\right)}^2=m\frac{l^2}{2}\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-73184353c2896872a0e2e2d4b04e235c_l3.jpg)

Момент инерции ( ) для горизонтального стержня равен:
Найдем момент инерции для стержня параллельного оси вращения. Для этого выделим на этом стержне материальную точку массы . Для нее момент инерции относительно указанной на рис.2 оси равен:
где l – расстояние по горизонтали от массы до оси вращения, оно при движении по стержню не изменяется.
Найдем момент инерции всего стержня ( ) для этого просуммируем подобные (2.3) элементарные моменты инерции, а так как стержень непрерывный, то вместо суммы возьмем интеграл:
Автор статьи

Читайте также: